基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序源码。基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序 实验器材: MSP432P401R MPU6050陀螺仪 硬件资源: 1,DS0(连接在PF9). 2,串口1(波特率:9600,P2.2/P2.3)....
”源码软件 陀螺仪串口输出姿态角程序源码 陀螺仪串口输出姿态角程序“ 的搜索结果
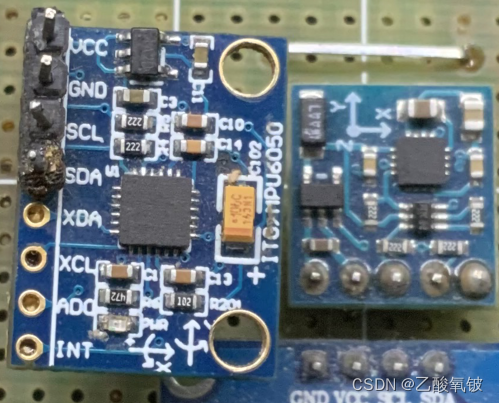
基于MSP432P401R的MPU6050陀螺仪串口输出姿态角程序 实验器材: MSP432P401R MPU6050陀螺仪 硬件资源: 1,DS0(连接在PF9). 2,串口1(波特率:9600,P2.2/P2.3).. 3,MPU6050陀螺仪控制信号线如下 SDA <-------------> P6.4...





陀螺仪在你设置好参数之后,就会根据你设置的参数获取数据,数据存储在对应的寄存器中,你可以通过对应寄存器读取到想要的数据。我们是使用这个装置(或者说设备)获取到数据,再使用这个数据得到我们想要的信息。...
程序将各个传感器值和解算后的姿态发送到主串口TXO输出给上位机。连接上位机将显示波形和各传感器值 以上功能提供源码,编译器为MDK:编译环境:MDK-Lite Version: 4.23 MiniIMU AHRS 姿态仪硬件组成: MPU-6050 集成3...
购买了 维特智能九轴加速度计、陀螺仪模块 ,型号WT901 。在其提供的的示例程序中,只找到了VC++ 与 C#的示例程序,没有找到我想要的Python示例程序。 好在厂家提供的说明书中对模块所使用的串口协议做了说明。参照...

Arduino uno + mpu6050 陀螺仪 运用卡尔曼滤波姿态解算源代码(已验证) 关于怎么接线,请参照:https://blog.csdn.net/ling3ye/article/details/51360568 这是.ino程序文件: //连线方法 //MPU-UNO //VCC-VCC //GND...
JY61P可以通过串口进行数据通信,这使得它可以与各种设备和控制器进行连接和交互。下面是关于JY61P串口使用的简要介绍:硬件连接:将JY61P的串口引脚(TX和RX)连接到要使用的设备的串口引脚(如STM32的TX和RX引脚)...
本项目中使用的是MPU6050模块,如图 1所示。该模块集成了一片MPU6050...STM8单片机对MPU6050输出的加速度和角度信息进行姿态融合,再添加上包头串行输出三轴加速度、三轴角速度、三轴角度和温度数据,输出频率为100Hz。
MPU6050六轴传感器实验STM32F407开发板KEIL软件工程源码: void usart1_send_char(u8 c) { while(__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_TC)==RESET){}; USART1->DR=c; } //传送数据给匿名四轴上位机...

LSM6DS3TR-C是单芯片“3轴陀螺仪 + 3轴加速度计”的惯性 测量单元(IMU), 五种种可选满量程的陀螺仪(125/250/500/1000/2000 dps)和加速度计(2/4/8/16 g)。上述工程中选择的加速度和陀螺仪对应的量程为2g和2000dps,...
三轴陀螺仪3. 三轴磁力计三. 状态估计1. 姿态估计(1)线性互补滤波器(2)非线性互补滤波器(3)卡尔曼滤波器2. 速度估计3. 位置估计四. 姿态角测量与滑动平均滤波1. IIC读取JY901B姿态角2. UART读取十轴惯导姿态...
这篇来教大家如何快速的使用MPU6050自带的DMP库读取陀螺仪数据,读取翻滚角(Roll)、俯仰角(Pitch)、航向角(Yaw)这三个角的数据。
文章主要讲述了mpu6050的姿态获取原理,使用HAL库编程时Cube MX的配置和Cube IDE编程,DMP解算MPU6050姿态的过程,附带开源代码。
利用 STM32 单片机提供一个自然且高效的人机交互方法,设计并实现数据手套可以稳定地为虚拟现实系统提供姿态及运动数据,其应用增加了人机交互的沉浸感与灵活性,能够便捷地应用于其他虚实融合类系统。

最后更新共计113个分类5177套源码29.2 GB。 卷 新加卷 的文件夹 PATH 列表 卷序列号为 00000200 5E7A:7F30 F:. ├─前台界面 │ ├─3D标签云卡片热门 │ │ Android TagCloudView云标签的灵活运用.rar │ │ ...


就是软硬件的规则,与某个具体的硬件无关。
上传数据给上位机V7.1版本方法1 /*^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^上传数据给...////串口1发送1个字符 ////c:要发送的字符 void usart1_send_char(u8 c) { while(__HAL_UART_GET_FLAG(&a
推荐文章
- Java中的代码块_java代码块-程序员宅基地
- Springboot+Swagger生成接口文档---自定义返回Model(兼容Map、Object)_swagger 2.0 返回map-程序员宅基地
- Xml文档验证—基础篇-程序员宅基地
- Hive的元数据存储与元数据表-程序员宅基地
- Linux简介(3)--文件及文件操作命令_:wq!还是no file name-程序员宅基地
- LibreBoard安装_docker libreboard-程序员宅基地
- QtConcurrent命名空间_qtconcurrent::blockingfiltered功能-程序员宅基地
- 一起学设计模式 - 一起开始设计模式的修炼之路_一起来学习设计模式-程序员宅基地
- 第8课 商业需求文档(BRD)撰写方法与技巧-程序员宅基地
- 集成学习(Ensemble Learning)_小型数据集联合学习-程序员宅基地